Prerequisites
A vector space (over ) is a set with two operations:
- Vector addition
- Scalar multiplication
such that is an abelian group and, for all ,
Let be a vector space. A subspace of is a subset of such that, whenever and .
Let and be vector spaces. A function is a linear map (or linear transformation) if: for all and .
Proposition: If is a linear map, then
- is a subspace of and
- = is a subspace of .
Example:
Let . If is a set of all polynomials, then is a subspace. For , if is the set of all polynomials of degree less than or equal to , then is a subspace. For , the -th derivative gives a linear map : for any and . We have
Let be a finite subset. A linear combination of is an element of of the form , for some . The span of a subset is the set: Easy facts:
is a subspace of . is a subspace if and only if .
are said to be linear independent if the following conditions: for some then necessarily .
If are not linearly independent, we say that they are linearly dependent.
The set is a basis for if
- and
- are linearly independent.
If and are bases for , then .
Corollary: Let be a n-dimensional vector space and let . If either of the following holds, then is a basis.
- is linearly independent or,
Example: does not have a basis.
The rank-nullity theorem:
Let and be finite-dimensional vector spaces and a linear map. Then,
Let a function , suppose we say that, is differentiable at , with derivative if Now consider , where , is an open subset. Let , then difference quotient will not work.
Rewrite, This works for . Observe that is a linear map from to . This motivates that is differentiable at if there exists a linear map such that
Proposition: If such a linear map exists, then it is unique.
Definition: is said to be the derivative (Frechet derivative) of at .
Now, consider , . Let , we say that is differentiable at if one of the following equivalent conditions holds:
- There is a linear map such that
- If we write . Then each is differentiable at . Note that
We denote by or .
Proposition: Let and . If , , exist in neighborhood of and they are continuous there, then is differentiable at .
In fact, the matrix of (with respect to the standard bases of and ) is given by: Also called the Jacobian matrix of at .
Recall the partial derivatives of a function . Let , Here is the standard basis of .
Now, let . If the limit exists, then we call it the directional derivative of along at .
Partial derivatives vs directional derivatives:
Let and , . Suppose that is differentiable at . Then we have,
Chain rule:
Let . If is differentiable at , and is differentiable at , then is differentiable a and
Manifolds
Idea: spaces which locally resemble open sets in Euclidean space.
The first requirement for transferring the ideas of calculus to manifolds is some notion of smoothness.
Definition:
Topological space is a geometrical space in which closeness is defined but cannot necessarily be measured by a numeric distance. More specifically, a topological space is a set whose elements are called points, along with an additional structure called a topology, which can be defined as a set of neighborhoods for each point that satisfy some axioms formalizing the concept of closeness. A topological space is the most general type of mathematical space that allows for the definition of limits, continuity, and connectedness.
A homeomorphism is a continuous, bijective map such that is continuous.
Suppose is a topological space. We say that is a topological manifold of dimension or a topological n-manifold if it has the following properties:
is a Hausdorff space: for every pair of distinct points , there are disjoint open subsets such that and .
is second-countable: there exists a countable basis for the topology of .
is locally Euclidean of dimension : each point of has neighborhood that is homeomorphic to an open subset of .
A topological manifold of dimension is Hansdoff, second countable topological space such that every point has a neighborhood which is homeomorphic to an open subset of . Any Hansdoff, second countable, locally Euclidean topological space is metricable. In other words, there is a distance function on such that the topology induced by coincides with the topology on .
The pair of homeomorphic i.e. is called a chart. The collection of charts which covers is called an atlas.
Alternative definition of topological manifolds of dimension : is a separable metric space which is locally Euclidean of dimension .
Coordinate charts:
Let be a topological n-manifold. A coordinate chart (or just a chart) on is a pair , where is an open subset of and is a homeomorphism from to an open subset . By definition of a topological manifold, each point is contained in domain of some chart . If , we say that the chart is centered at p. If is any chart whose domain contains , it is easy to obtain a new chart centered at by subtracting the constant vector . Given a chart , we call the set a coordinate domain, or a coordinate neighborhood of each of its points.
The map is called a local coordinate map and the component functions of , defined by , are called local coordinates on . We sometimes denote the chart by .
Examples:
Graph of a continuous functions Spheres
Smooth structures:
To make sense of derivatives of real-valued maps between manifolds, we need to introduce a new kind of manifold called a smooth manifold. If and are open subsets of Euclidean spaces and , respectively, a function is said to be smooth if each of its component functions has continuous partial derivatives of all orders. If in addition is bijective and has a smooth inverse map, it is called a diffeomorphism.
Consider an arbitrary topological n-manifold . Each point in is in the domain of a coordinate map . A plausible definition of smooth function on would be to say that is smooth if and only if the composite function is smooth in the sense of ordinary calculus. But this will make sense only if this property is independent of the choice of coordinate chart. To guarantee this independence, we will restrict our attention to smooth charts.
Let be a topological n-manifold. If are two charts such that , the composite map is called the transition map from to . Two charts and are said to be smoothly compatible if either or the transition map is a diffeomorphism. We define an atlas for to be a collection of charts whose domains cover . An atlas is called a smooth atlas if any two charts in are smoothly compatible with each other.
Our plan is to define a smooth structure on by giving a smooth atlas, and to define a function to be smooth if and only if is smooth in the sense of ordinary calculus for each coordinate chart in the atlas. But, in general, there will be many possible atlases that give same smooth structure, in that they all determine the same collection of smooth functions on . We make the following definition: a smooth atlas on is maximal if it is not properly contained in any larger smooth atlas. This means that any chart that is smoothly compatible with every chart in is already in . If is a smooth manifold, any chart contained in the given maximal smooth atlas is called a smooth chart.
Note: Two smooth atlases for determine the same smooth structure if and only if their union is a smooth atlas.
Examples:
Open subset of Euclidean spaces Finite dimensional vector spaces
Smooth maps
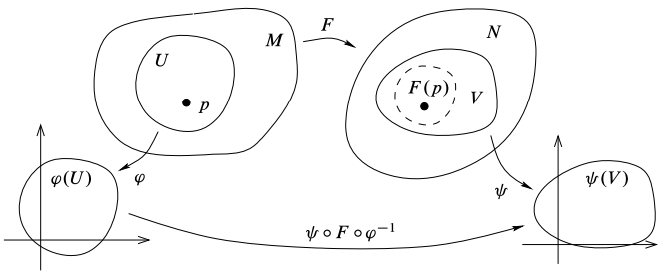
Let be smooth manifolds, and let be any map. We say that is a smooth map if for every , there exists smooth charts containing and containing such that and the composite map is smooth from to .
Tangent vectors and tangent spaces:
In order to make sense of calculus on manifolds, we need to introduce the tangent space to a manifold at a point. Any geometric tangent vector yields a map , which takes the directional derivative in the direction at : This operator is linear over and satisfies the product rule:
Let be a n-manifold and let . A linear map is called a derivation at if it satisfies: The set of derivations of at , denoted by , is a vector space called the tangent space to at . An element of is called a tangent vector at .
Often it is useful to consider the set of all tangent vector at all points of a manifold. Give a smooth manifold , we define the tangent bundle of , denoted by , to be disjoint union of the tangent spaces at all points of .
…
A vector field on is an assignment of a tangent vector to every . Let be a smooth manifold, and let be a rough vector field. If is any smooth coordinate chart on , then the restriction of to is smooth if and only if its component functions with respect to this chart are smooth.
Example: If is any smooth chart on , the assignment: determines a vector field on , called the ith coordinate vector field.
The primary objects associated with smooth vector fields are their integral curves, which are smooth curves whose velocity at each point is equal to the value of the vector field there. The collection of all integral curves of a given vector field on a manifold determines a family of all integral curves of given vector field on a manifold determines a family of diffeomorphisms of (open subsets of) the manifold, called flow.
Suppose is a smooth manifold. If is a smooth curve, then for each , the velocity vector is a vector in . We find a way backwards: given a tangent vector at each point, we seek a curve whose velocity at each point is equal to the given vector there. If is a vector field on , an integral curve of is differentiable curve whose velocity at each point is equal to the value of at that point: If , the point is called the starting point of .
…
Flows: todo
Tensors:
for covectors is a multilinear map.
Riemannian Metrics
To define geometric objects such as lengths and angles on a vector space, one uses an inner product. For manifolds, the appropriate structure if Riemannian metric, which is essentially a choice of inner product on each tangent space, varying smoothly from point to point. A choice of Riemannian metric allows us to define geometric concepts such as lengths, angles, and distances on smooth manifolds. A Riemannian metric on is a smooth symmetric covariant 2-tensor field on that is positive definite at each point. A Riemannian manifold is a pair , where is a smooth manifold and is a Riemannian metric on . If is a Riemannian metric on , then for each , the 2-tensor is an inner product on . b